Présentation de l'architecture Modbus retenue
Le synoptique suivant illustre une architecture Modbus générique :

Définition : Le maître (master)
Définition : Les esclaves (slaves)
Ce sont souvent des microcontrôleurs associés à des capteurs et/ou une interface homme/machine (bp, écrans, buzzer, etc) et/ou des actionneurs (servo-moteur par exemple). Ils sont aux ordres du maître et doivent recevoir une requête du maître pour envoyer leurs données.
Un maître Modbus peut contrôler jusqu'à 247 esclaves.
Définition : Bus et protocole Modbus
Remarque :
Modbus a su se moderniser et est décliné en Modbus TCP/IP : ce qui permet de contrôler des esclaves sur un réseau Ethernet ou bien en Wifi.

Encapsulation d'un PDU Modbus dans un PDU TCP/IP
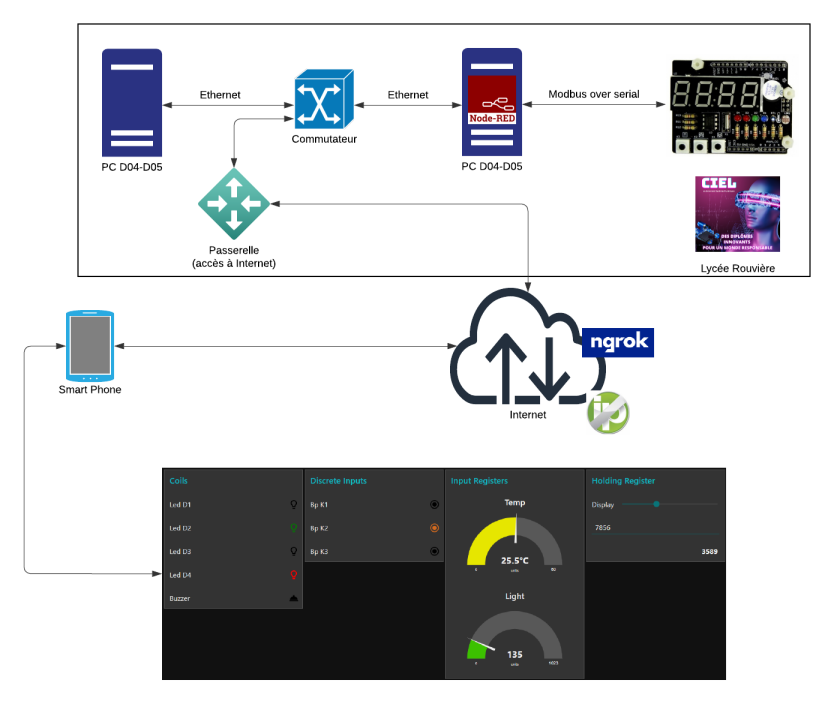
Fondamental : Architecture retenue pour le TP
Pour le TP le maître sera le PC de la salle de spécialité et l'esclave sera composé de la carte Arduino associée au shield Tick-Tock. La liaison physique sera obtenue à partir d'un câble USB mais sera vue par le maître et l'esclave comme une liaison série classique RS232, la liaison USB sera pour ainsi dire transparente pour les deux équipements Modbus.